2024.04.25
メディア
読売テレビ「ミャクミャク×いろりろ探検隊」で紹介されました
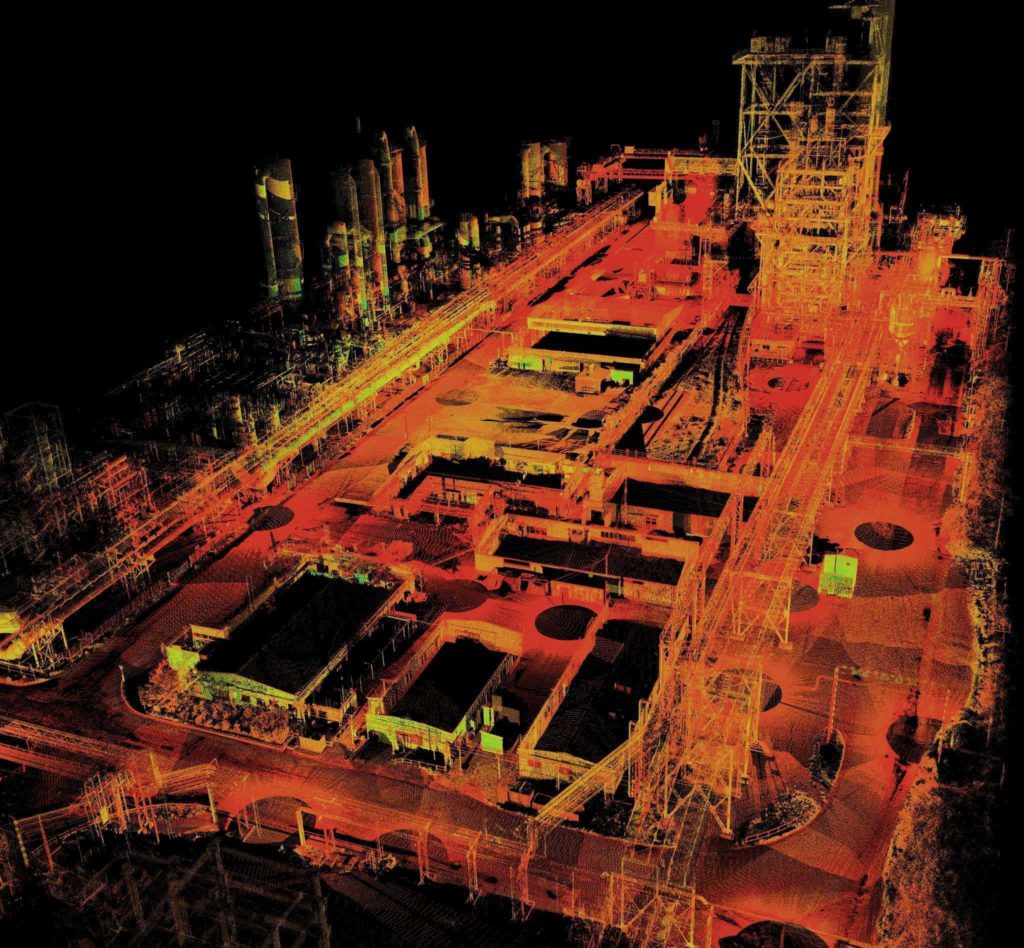
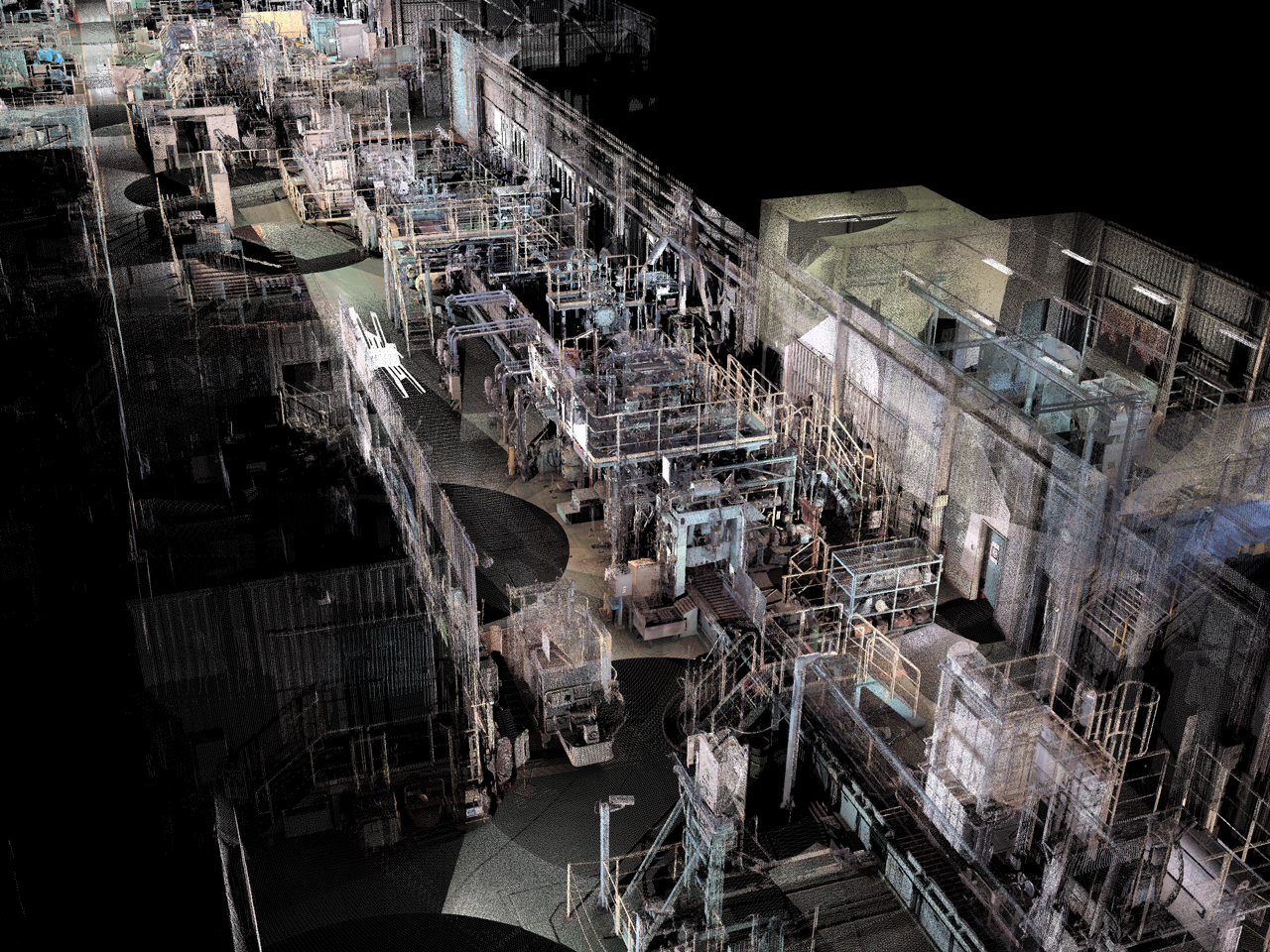
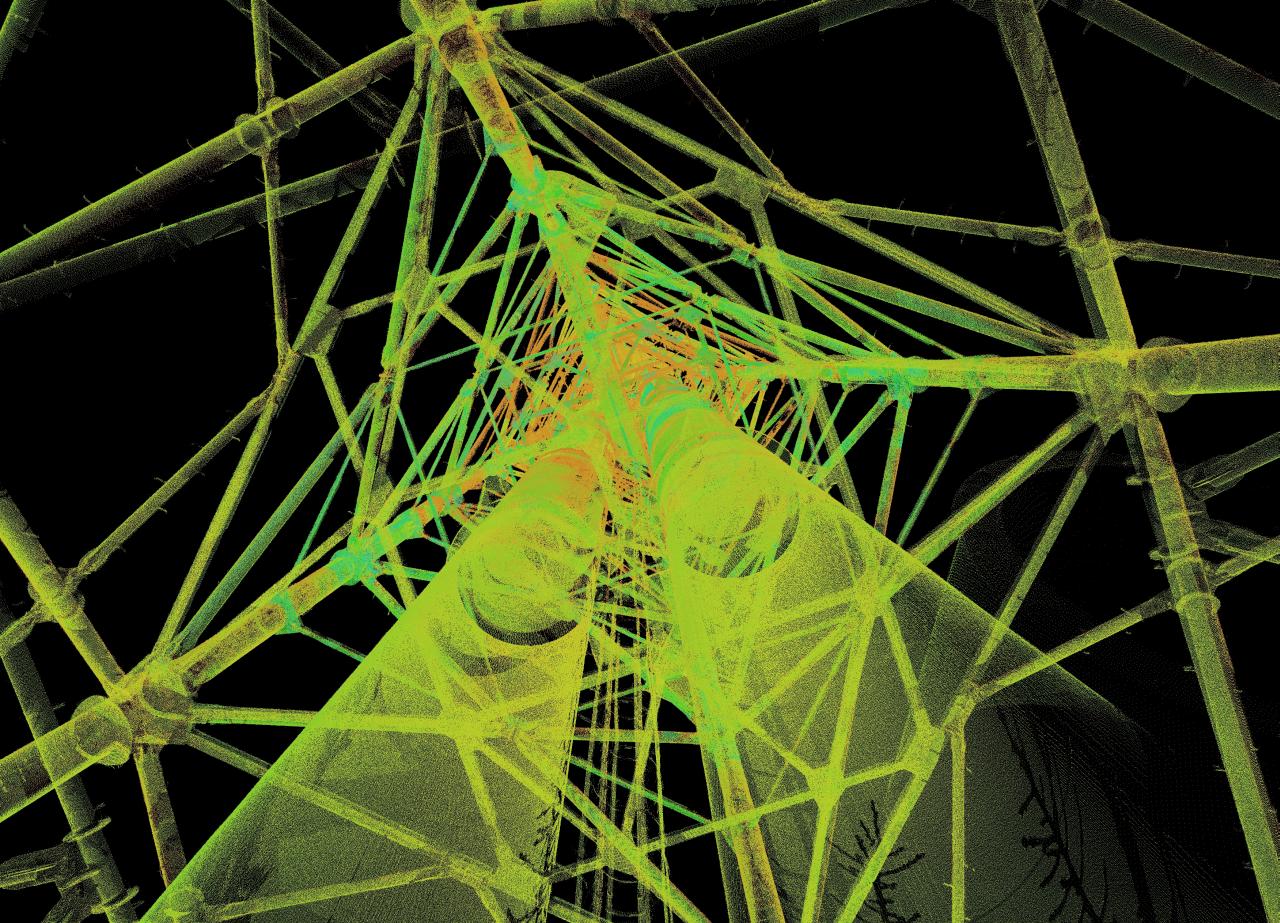
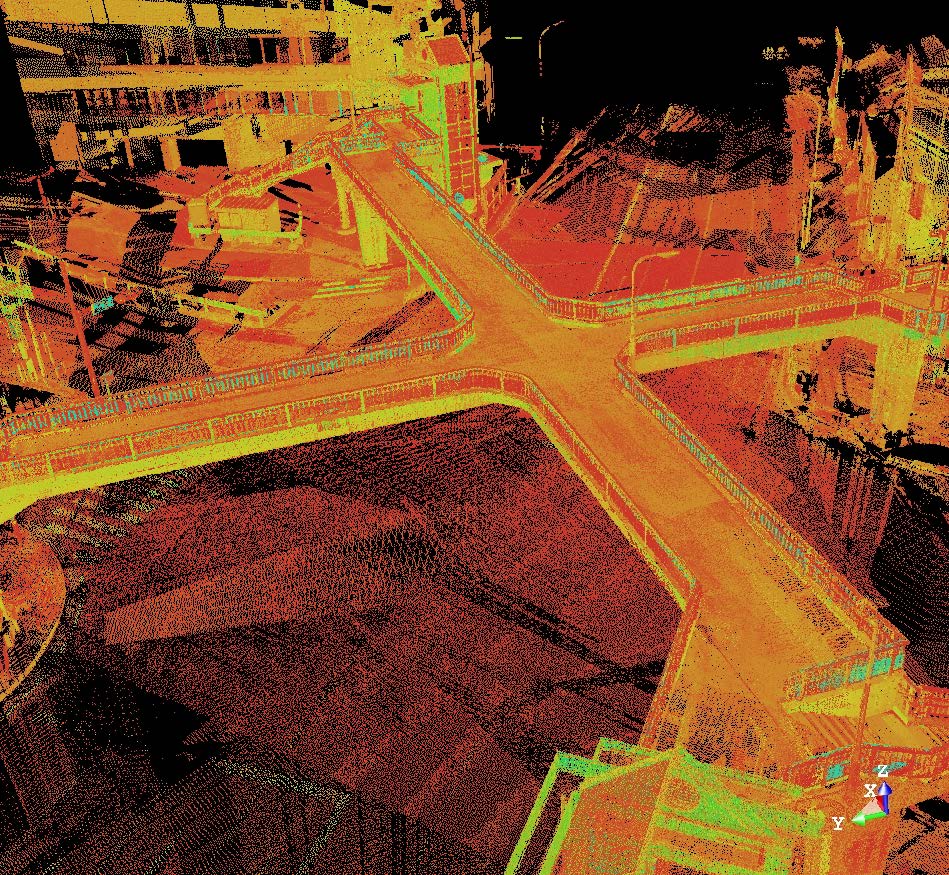
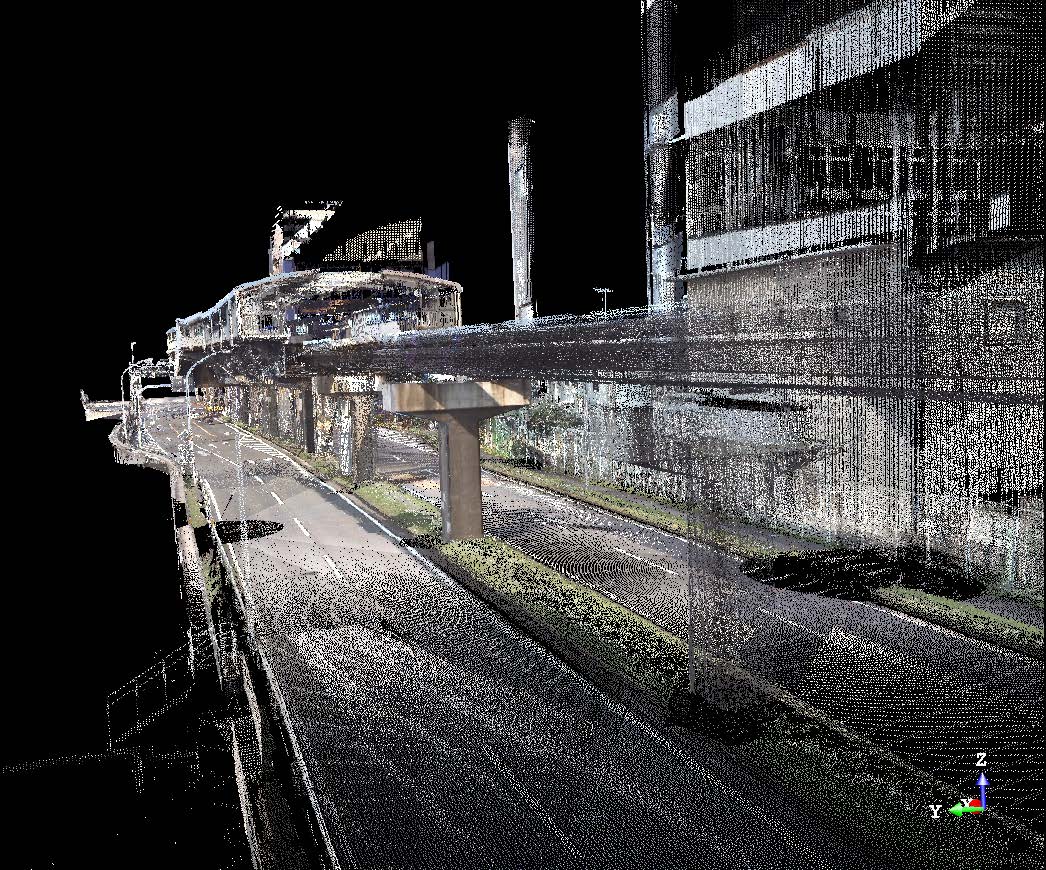
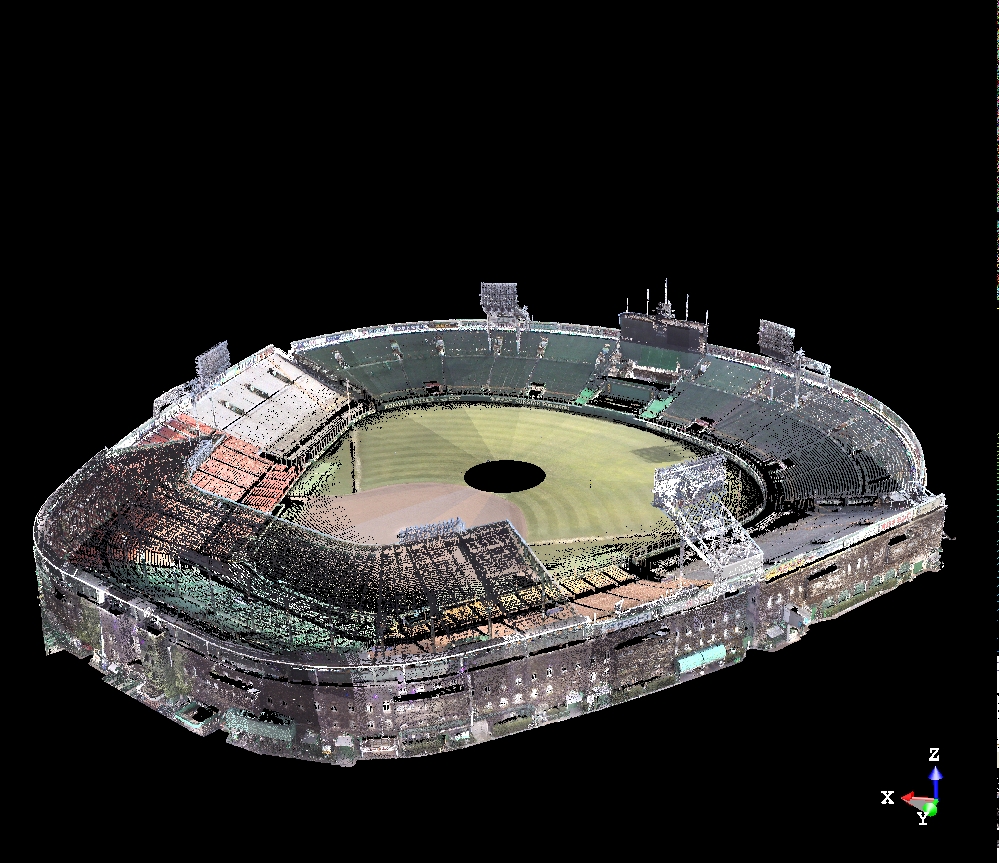
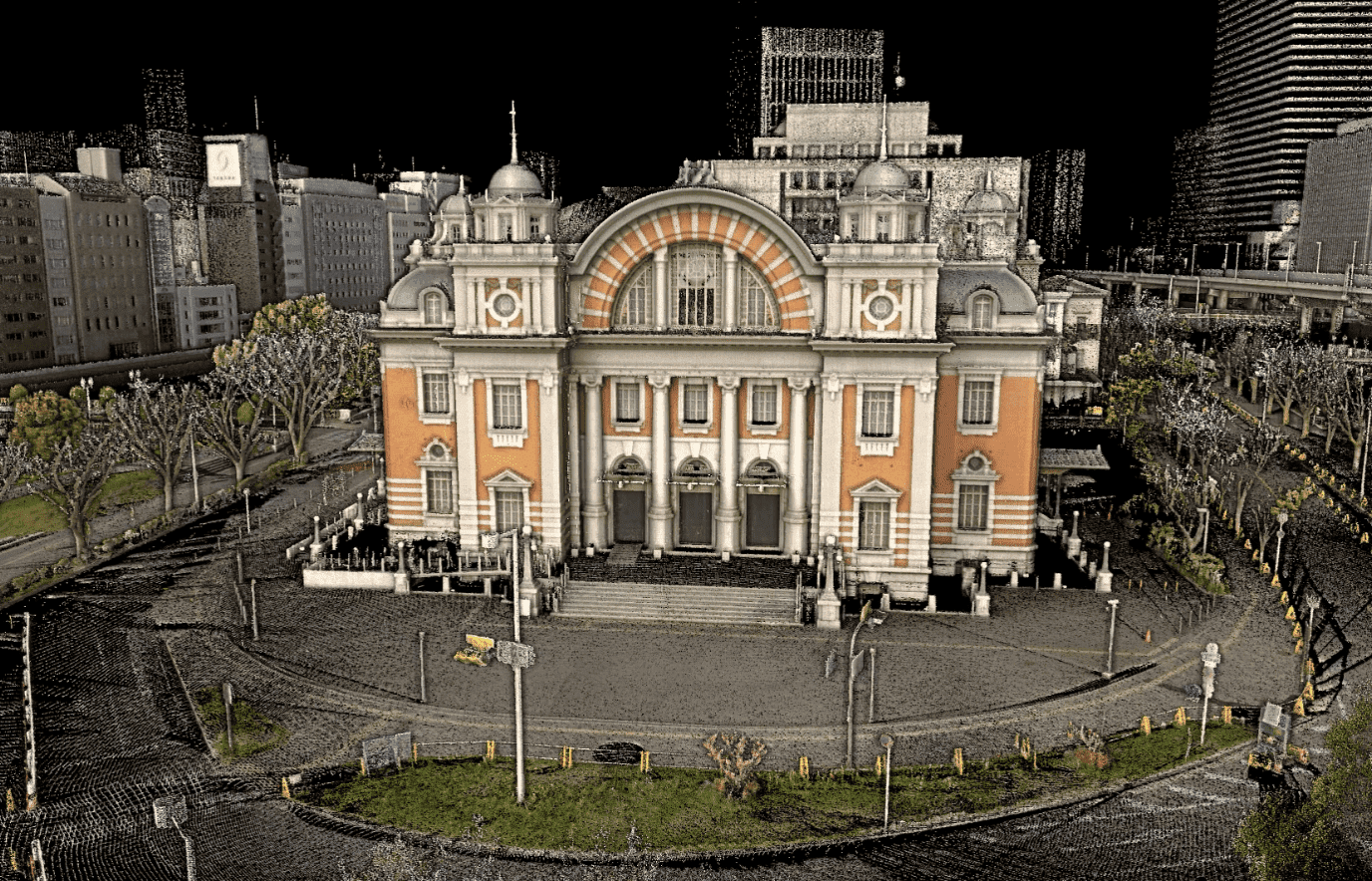
01 POINT-CLOUD 3D計測
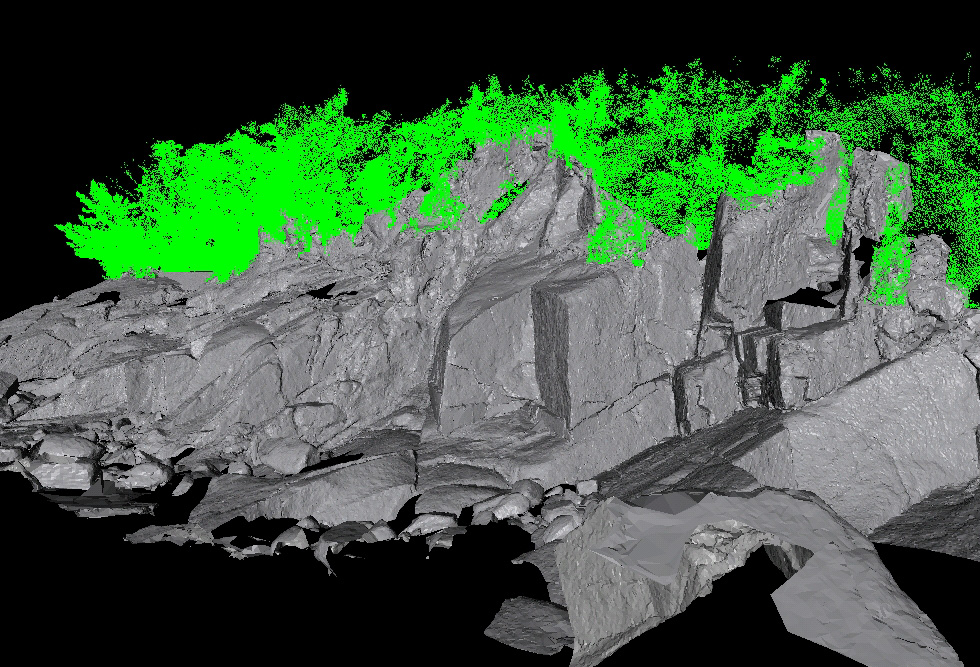
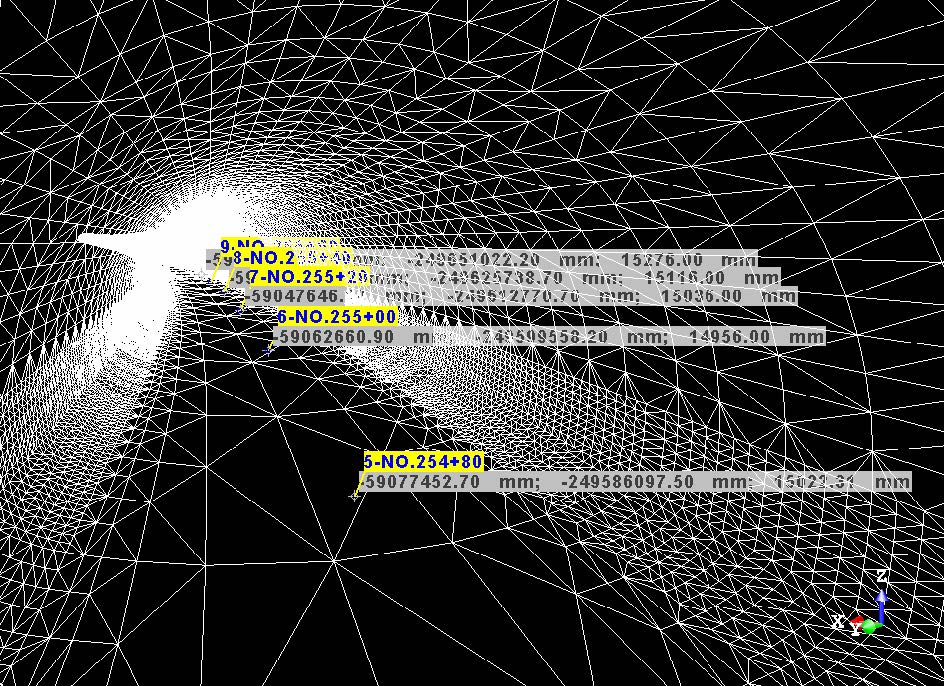
弊社は3Dレーザースキャナを使い、座標と色で物体を捉え、1秒間に100万点の点群データを取得。街や文化財、水中構造物など、あらゆるものを計測し、デジタルデータ化します。
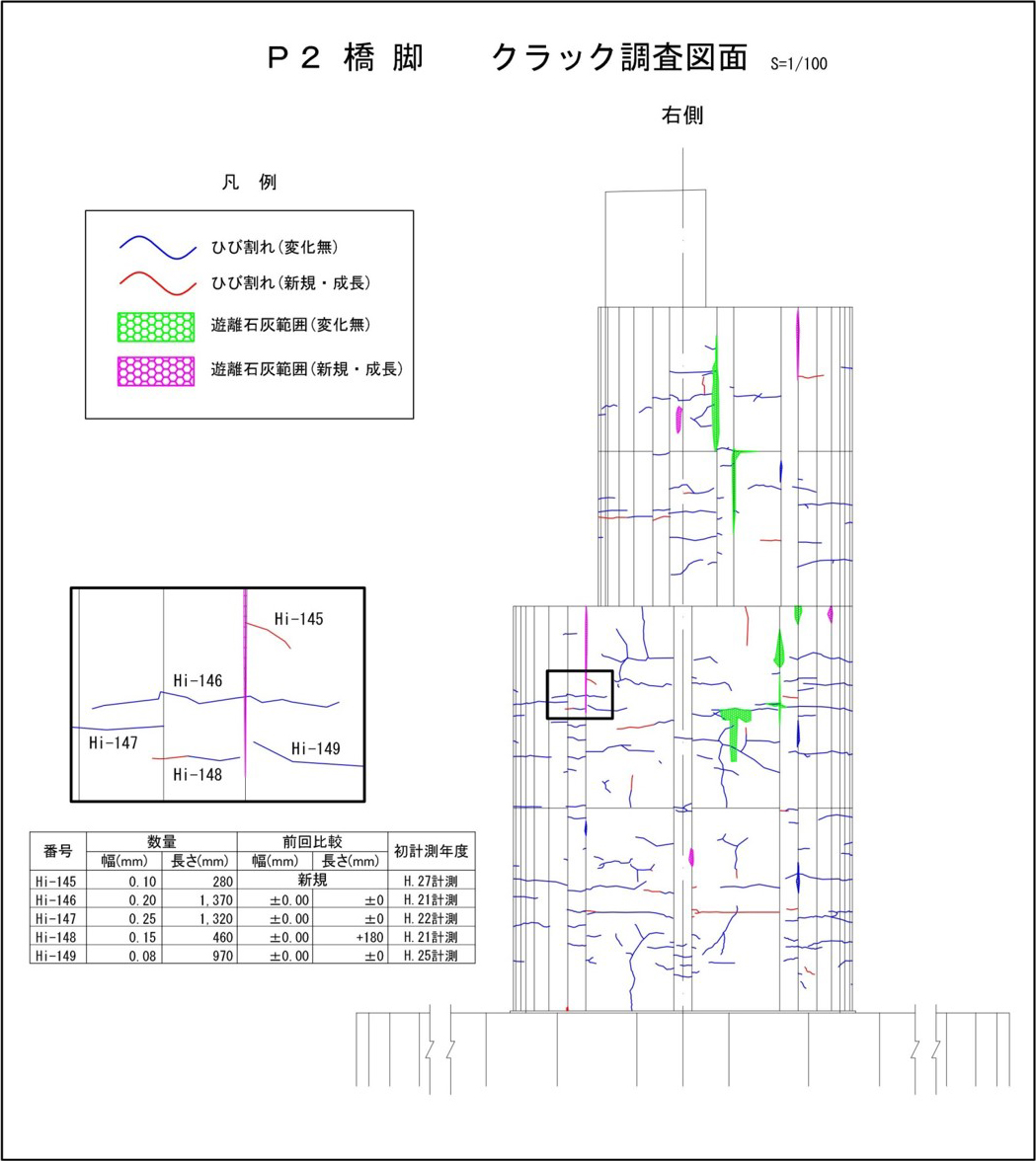
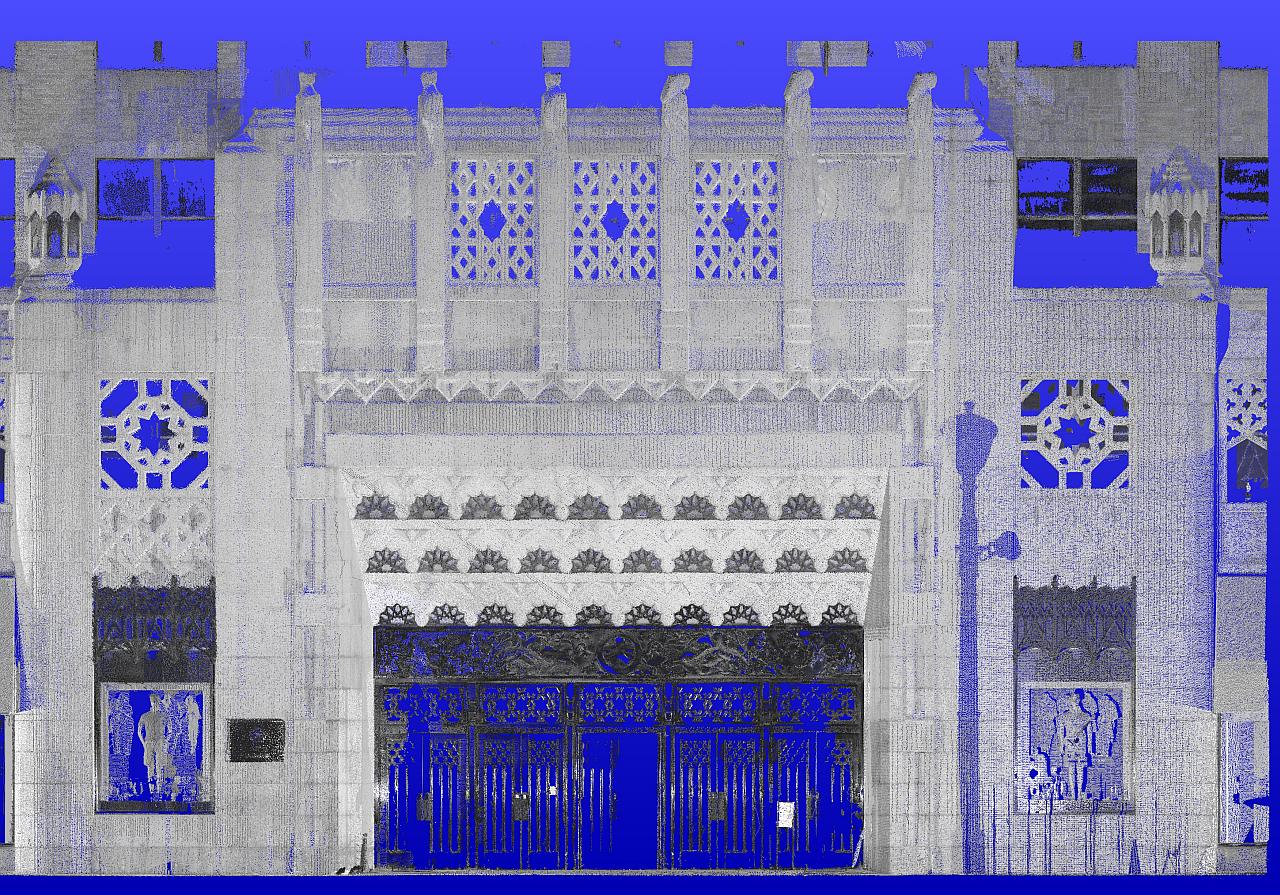
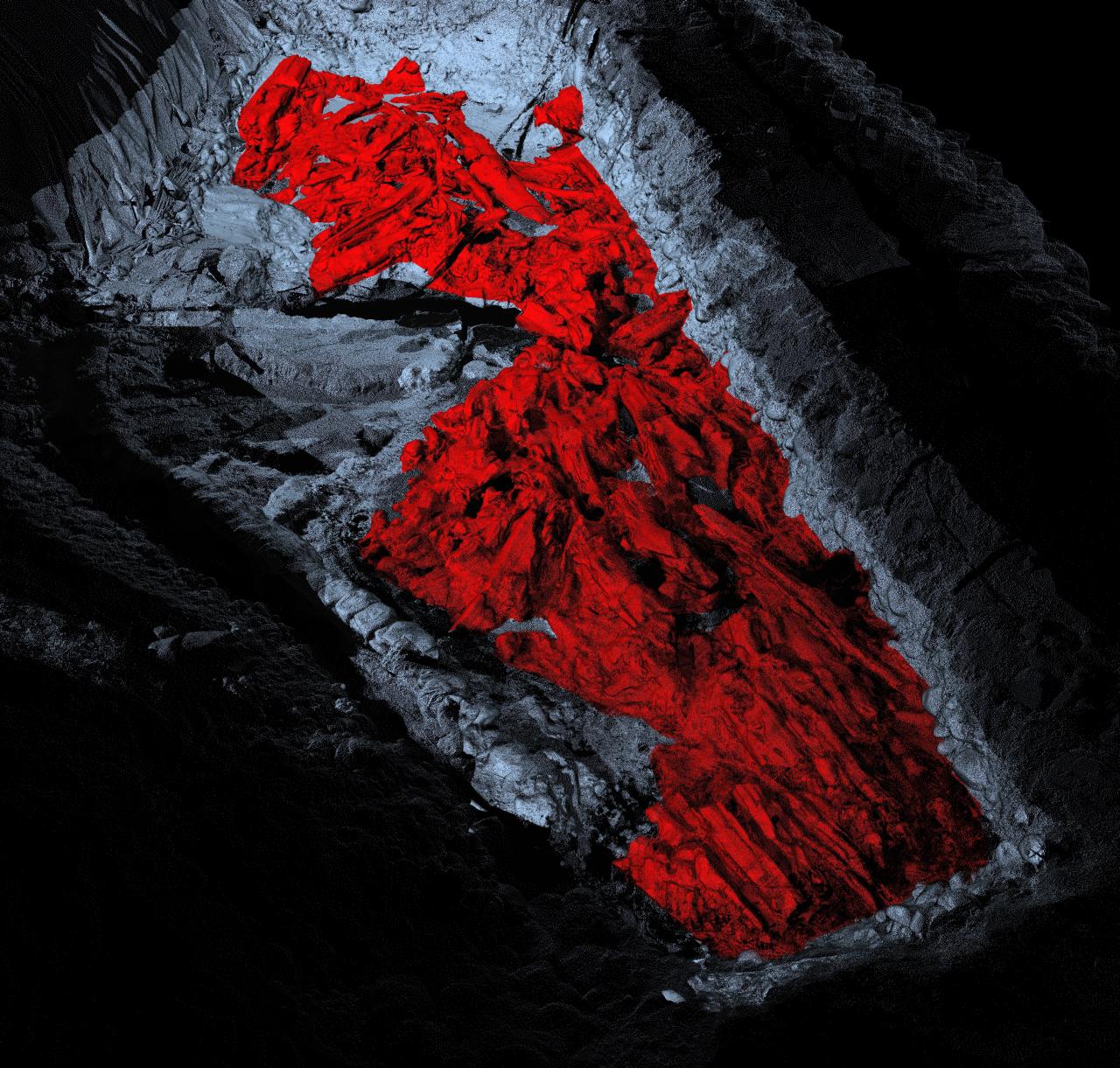
VIEW MORE02 RISK-SURVEY ダメージ調査
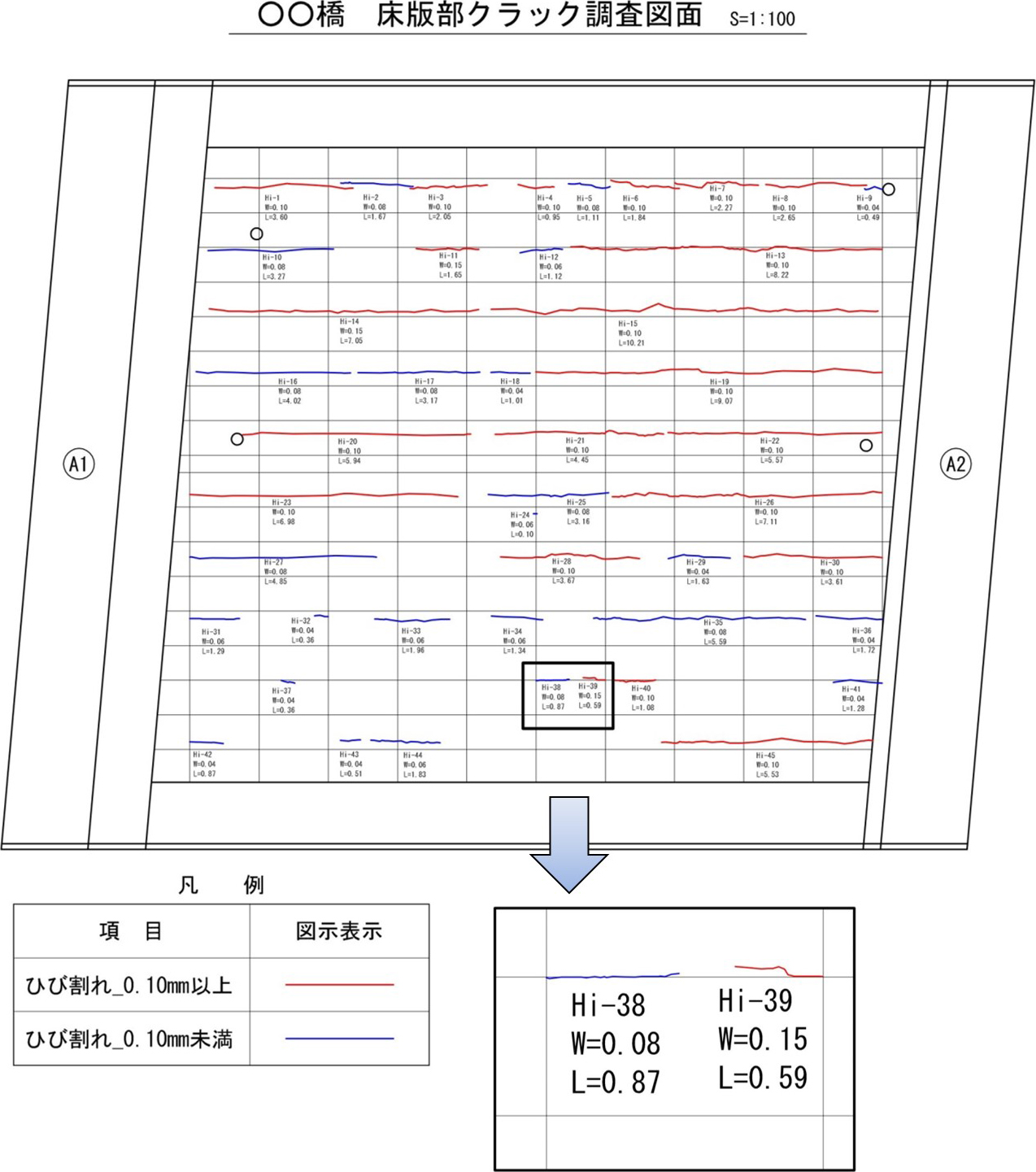
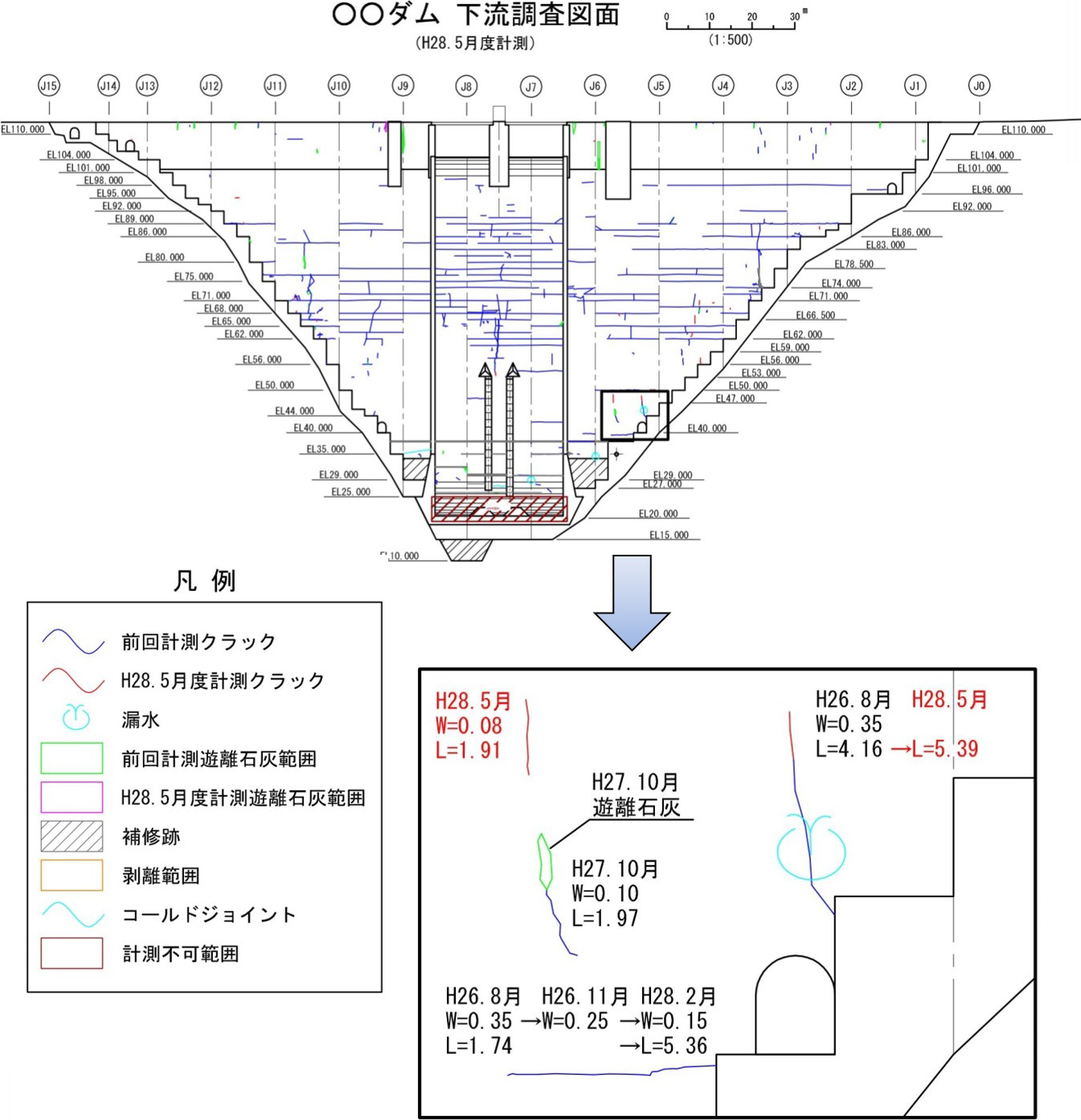
「KUMONOS」は、100m離れた場所からわずか0.2mmのひび割れを正確に計測する技術であり、弊社の特許技術です。AIや赤外線技術を活用した機器により、幅広い分野でリスクサーベイを行っています。
VIEW MORE03 i-Construction i-Con サプライヤー
1995年に測量会社として創業し、建築・土木工事を正確にマネジメントするために基準点測量が不可欠であることから、高度な測量技術を磨いてきました。その技術が、3D計測技術の基盤となっています。
VIEW MORE04 DEVICE solution 計測機器
1998年に海外で開発された3Dレーザースキャナを改良して、日本で初めて建設分野へ導入しました。以来、20年以上にわたって3Dレーザースキャナの国内トップランナーとして活躍、現在はアメリカのFARO社の代理店として、6年連続で世界一を誇っています。
VIEW MORE事業内容
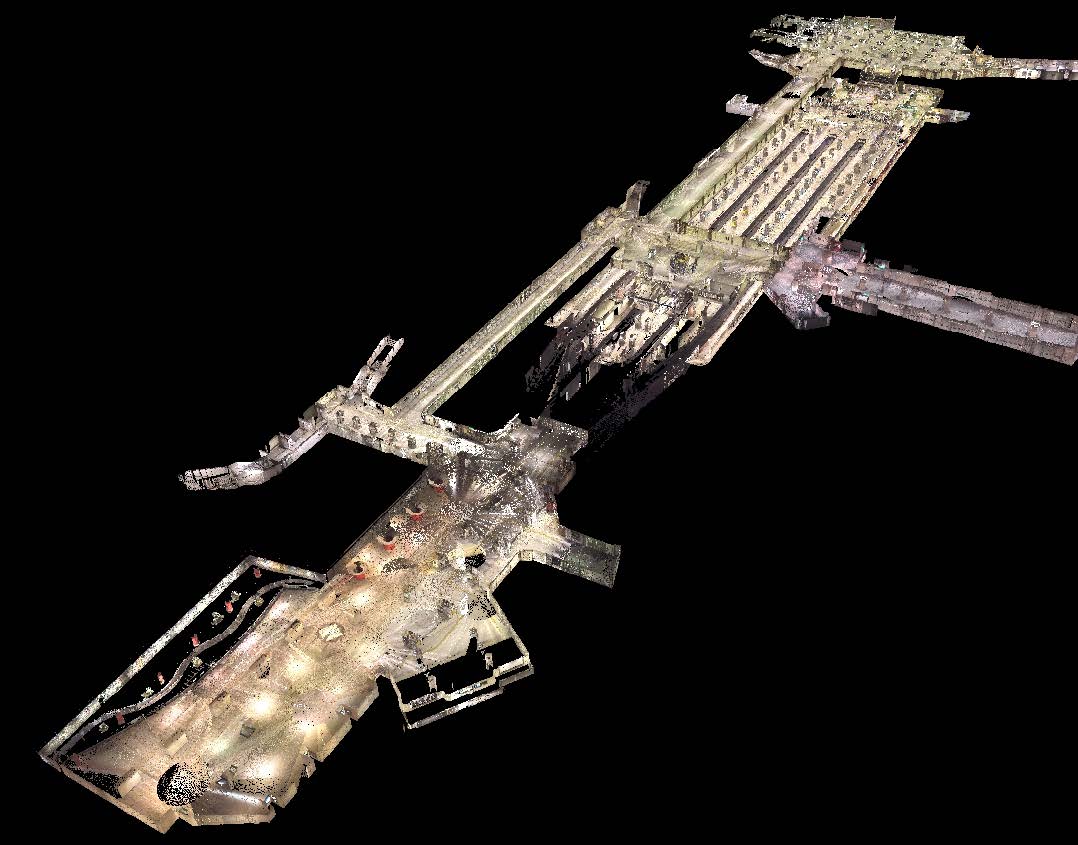
01POINT-CLOUD
弊社は3Dレーザースキャナを使い、座標と色で物体を捉え、1秒間に100万点の点群データを取得。街や文化財、水中構造物など、あらゆるものを計測し、デジタルデータ化します。
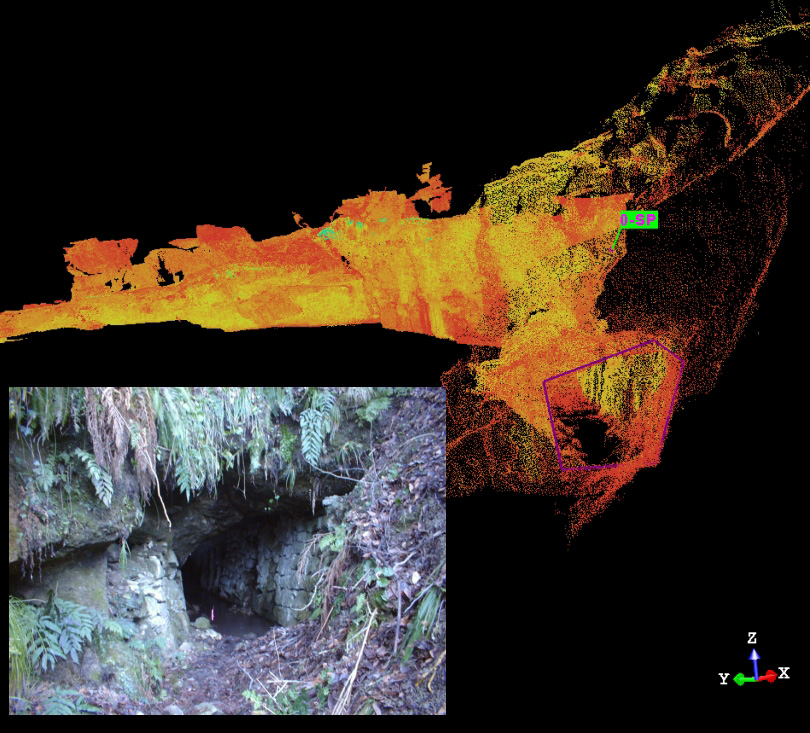
VIEW MORE02RISK-SURVEY
「KUMONOS」は、100m離れた場所からわずか0.2mmのひび割れを正確に計測する技術であり、弊社の特許技術です。AIや赤外線技術を活用した機器により、幅広い分野でリスクサーベイを行っています。
VIEW MORE03i-Construction
1995年に測量会社として創業し、建築・土木工事を正確にマネジメントするために基準点測量が不可欠であることから、高度な測量技術を磨いてきました。その技術が、3D計測技術の基盤となっています。
VIEW MORE04DEVICE solution
1998年に海外で開発された3Dレーザースキャナを改良して、日本で初めて建設分野へ導入しました。以来、20年以上にわたって3Dレーザースキャナの国内トップランナーとして活躍、現在はアメリカのFARO社の代理店として、6年連続で世界一を誇っています。
VIEW MORE
実績紹介
お客様サポート
ご相談・ご質問等ございましたら
お気軽にお問合せください。

クモノスコーポレーション株式会社
大阪本社
〒562-0035 大阪府箕面市船場東2-1-15
TEL: 072-749-1188 FAX: 072-749-1818
東京支店
〒105-0004 東京都港区新橋1-12-9 新橋プレイス7階
神奈川支店
〒210-0015 神奈川県川崎市川崎区南町20-3-7F-C
TEL: 044-244-1188 FAX: 044-244-1177
九州支店
〒812-0894 福岡県福岡市博多区諸岡3-9-6
TEL: 092-574-1818 FAX: 092-501-1414
山口営業所
〒740-0021 山口県岩国市室の木町1丁目1番8号
TEL: 0827-29-3923 FAX: 0827-29-3922